
Dynamic Measurement Method of Near-Bit Borehole Trajectory Parameters Based on Data Fusion
-
摘要: 采用三轴加速度计、磁通门和速率陀螺测量系统随钻测量井眼轨迹参数时,由于旋转、振动和磁干扰等因素的影响,造成测量结果存在较大偏差,无法满足随钻地质导向的要求。为此,针对三轴加速度计、磁通门和速率陀螺随钻测量系统,建立了基于四元数井眼轨迹参数测量模型,并依据状态方程和量测方程,应用3个捷联式卡尔曼滤波器和磁干扰校正系统对加速度计、磁通门信号进行滤波、校正,形成了基于数据融合的近钻头井眼轨迹参数动态测量方法。实验室模拟试验和现场实钻表明,采用该测量方法测得的井眼轨迹参数精度大幅提高。研究表明,采用基于数据融合的近钻头井眼轨迹参数动态测量方法可以消除旋转、振动和磁干扰对三轴加速度计、磁通门和速率陀螺随钻测量系统随钻测量结果的影响,提高该测量系统随钻测量的精度,满足随钻地质导向的要求。Abstract: When borehole trajectory parameters are measured while drilling by a measurement system of triaxial accelerometers, fluxgates, and rate gyros, the results show huge deviations due to the influence of factors such as rotation, vibration, and magnetic interference, etc. As a result, the requirements of geosteering while drilling cannot be met. Considering this, a quaternion-based measurement model of borehole trajectory parameters was built for the above measurement system. In addition, according to state equations and measurement equations, three strap-down Kalman filters and a correction system for magnetic interference were applied to filter and correct accelerometer and fluxgate signals. In this way, a dynamic measurement method of near-bit borehole trajectory parameters based on data fusion was developed. The simulations in the laboratory and on-site drilling showed that the measurement precision of borehole trajectory parameters was significantly improved by using the proposed method. The research indicates that the proposed method can eliminate the influence of rotation, vibration, and magnetic interference on the results of the measurement system of triaxial accelerometers, fluxgates, and rate gyros while drilling to upgrade the measurement precision for geosteering, thus meeting the requirements of geosteering while drilling.
-
-
![]()
图 6 测量井斜角、方位角与实际井斜角、方位角的对比
Figure 6. Comparison of measured and actual deviation angles and azimuths
![]()
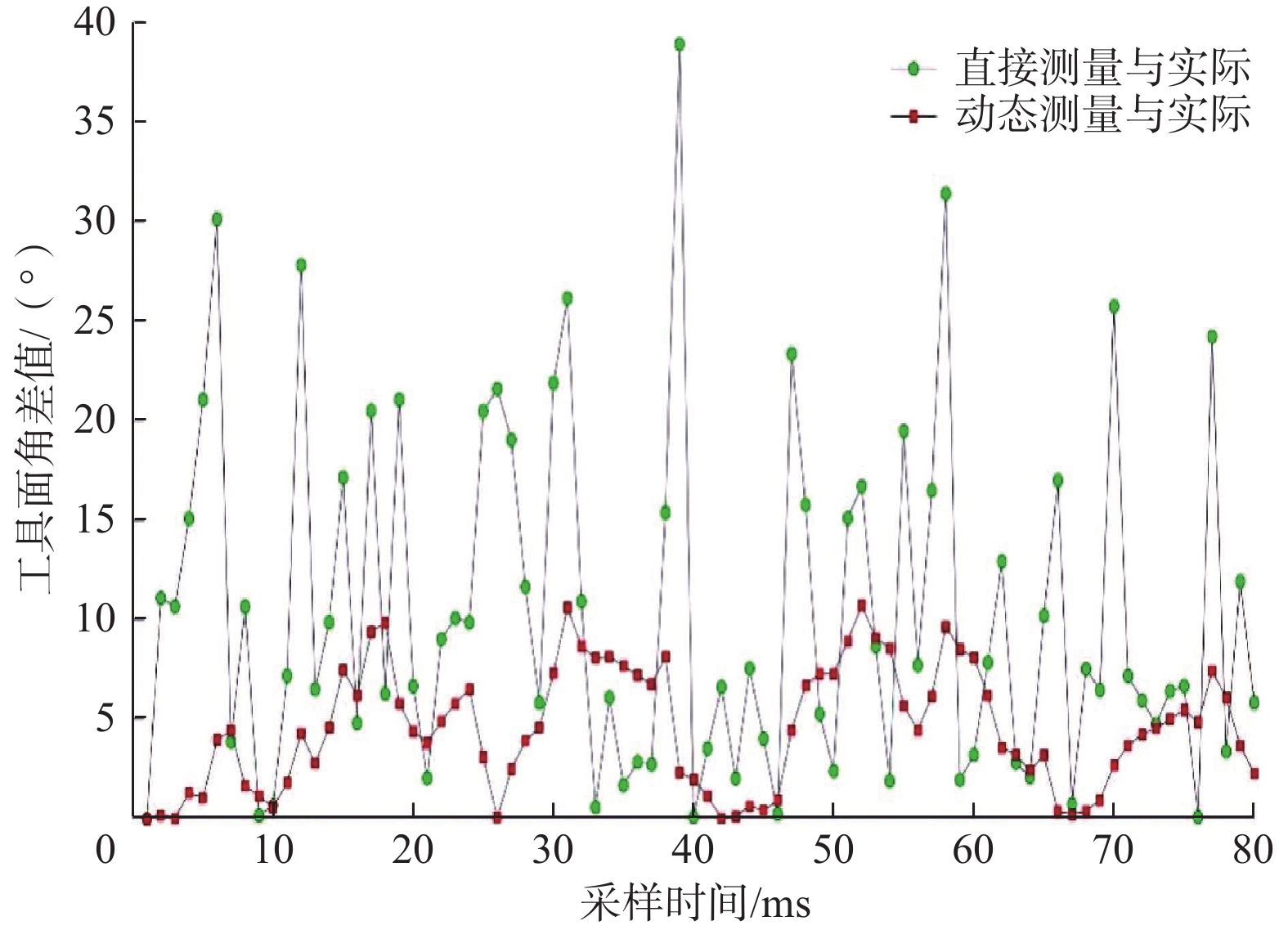
图 7 动态测量和直接测量工具面角与实际工具面角的差值
Figure 7. Difference between actual tool face angles and tool face angles measured by dynamic and direct methods
![]()
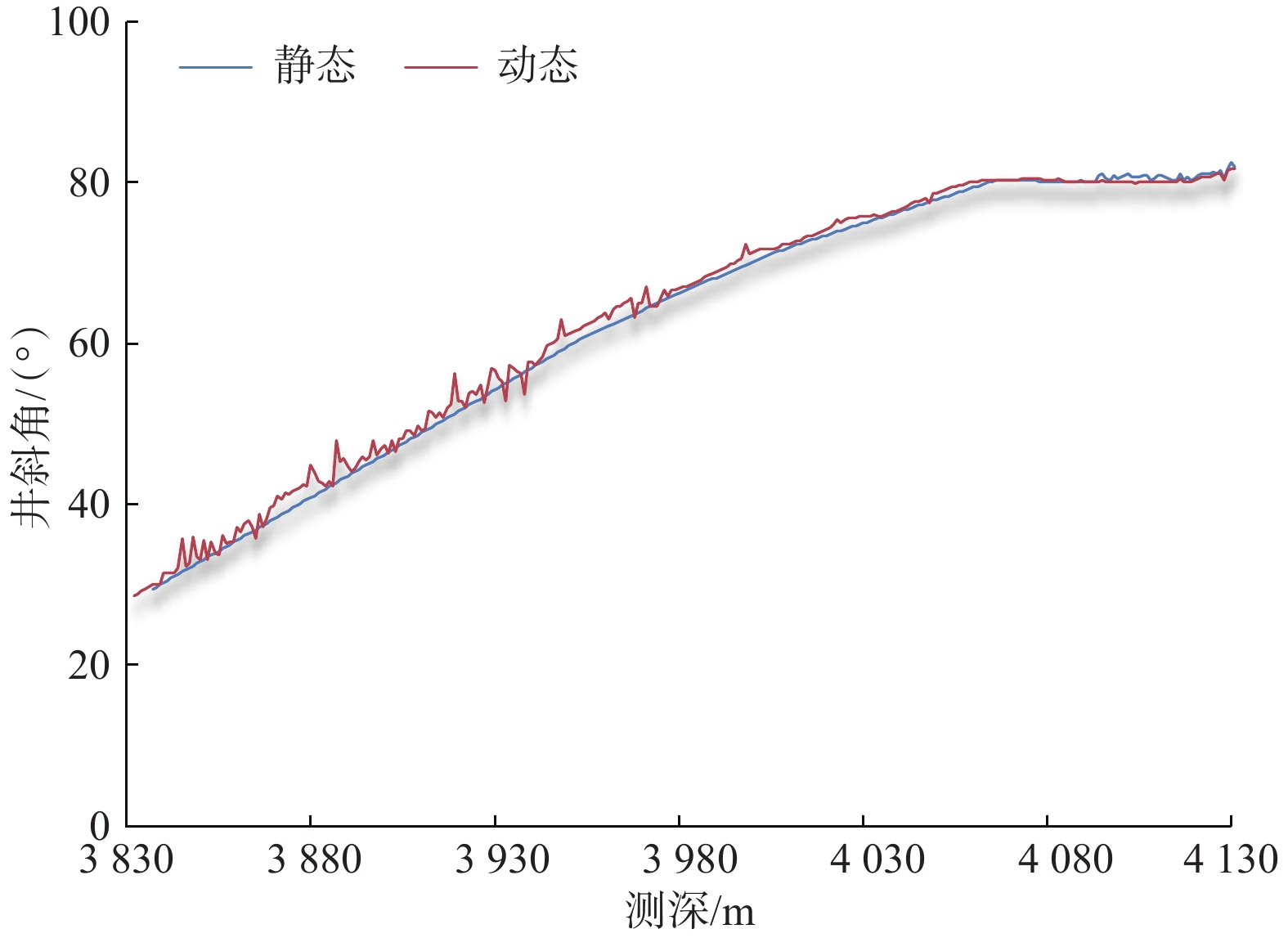
图 8 动态测量井斜角与静态测量井斜角的对比
Figure 8. Comparison of deviation angles measured by dynamic and static methods
![]()
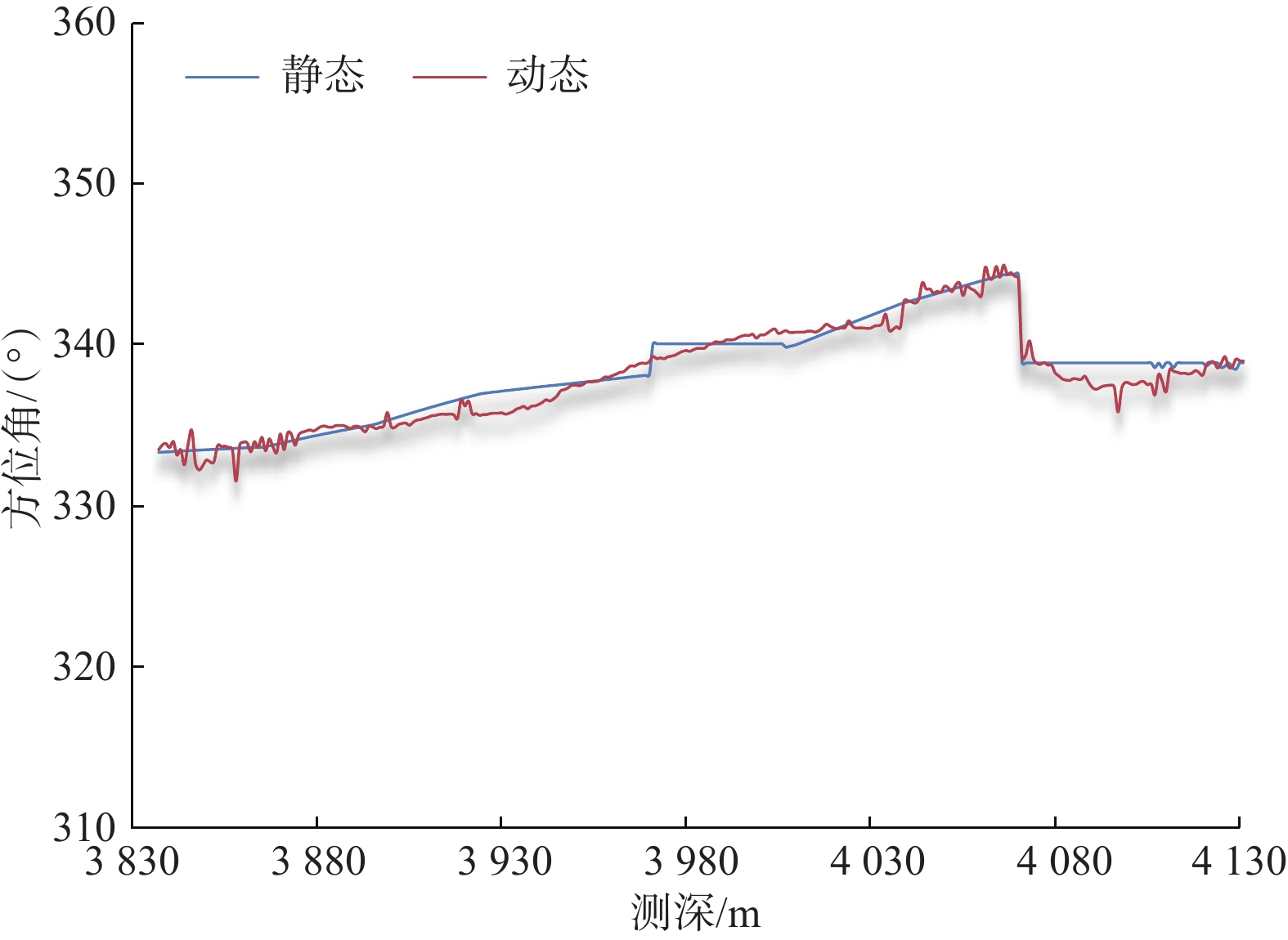
图 9 动态测量方位角与静态测量方位角的对比
Figure 9. Comparison of azimuths measured by dynamic and static methods
-
[1] 杨全进,徐宝昌,左信,等. 旋转导向钻具姿态的无迹卡尔曼滤波方法[J]. 石油学报,2013,34(4):1168–1175. YANG Quanjin, XU Baochang, ZUO Xin, et al. An unscented Kalman filter method for attitude measurement of rotary steerable drilling assembly[J]. Acta Petrolei Sinica, 2013, 34(4): 1168–1175.
[2] 高怡,程为彬,汪跃龙. 近钻头钻具多源动态姿态组合测量方法[J]. 中国惯性技术学报,2017,25(2):146–150. GAO Yi, CHENG Weibin, WANG Yuelong. Multi-source dynamic attitude combination measurement for near-bit drilling tool[J]. Journal of Chinese Inertial Technology, 2017, 25(2): 146–150.
[3] XUE Qilong, WANG Ruihe, SUN Feng. Continuous measurement while drilling utilizing strap down multi model surveying system[J]. IEEE Transactions on Instrumentation and Measurement, 2014, 63(3): 650–657. doi: 10.1109/TIM.2013.2282412
[4] ZHEN Ziyang, XING Dongjing, GAO Chen. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm[J]. Aerospace Science and Technology, 2018, 76: 402–411. doi: 10.1016/j.ast.2018.01.035
[5] 徐宝昌,杨全进,蒋海旭. 旋转导向系统有色噪声的改进无迹卡尔曼滤波方法[J]. 中国石油大学学报(自然科学版),2015,39(2):157–163. XU Baochang, YANG Quanjin, JIANG Haixu. Improved unscented Kalman filtering method for colored noises of rotary steerable system[J]. Journal of China University of Petroleum(Edition of Natural Science), 2015, 39(2): 157–163.
[6] COLUCCIA A, RICCIATO F. On ML estimation for automatic RSS-based indoor localization: IEEE 5th International Symposium on Wireless Pervasive Computing, Modena, May 5-7, 2010[C].
[7] OUYANG R W, WONG A K, LEA C, et al. Received signal strength-based wire-less localization via semidefinite programming: Proceedings of the Global Communications Conference, Honolulu, November 30–December 4, 2009[C].
[8] 高怡,汪跃龙,程为彬. 抗差自适应滤波的导向钻具动态姿态测量方法[J]. 中国惯性技术学报,2016,24(4):437–442. GAO Yi, WANG Yuelong, CHENG Weibin. Robust adaptive filtering method for dynamic attitude measurement of steering drilling[J]. Journal of Chinese Inertial Technology, 2016, 24(4): 437–442.
[9] 鲁港,佟长海,夏泊洢,等. 空间圆弧轨迹的矢量描述技术[J]. 石油学报,2014,35(4):759–764. doi: 10.7623/syxb201404019 LU Gang, TONG Changhai, XIA Boyi, et al. Vector description of spatial -arc well bore trajectory[J]. Acta Petrolei Sinica, 2014, 35(4): 759–764. doi: 10.7623/syxb201404019
[10] 路保平,倪卫宁. 高精度随钻成像测井关键技术[J]. 石油钻探技术,2019,47(3):148–155. doi: 10.11911/syztjs.2019060 LU Baoping, NI Weining. The key technologies of high precision imaging logging while drilling[J]. Petroleum Drilling Techniques, 2019, 47(3): 148–155. doi: 10.11911/syztjs.2019060
[11] 陆自清. 基于卡尔曼滤波的动态地质模型导向方法[J]. 石油钻探技术,2021,49(1):113–120. LU Ziqing. Geosteering methods of a dynamic geological model based on Kalman filter[J]. Petroleum Drilling Techniques, 2021, 49(1): 113–120.
[12] WANG Ruihe, XUE Qilong, SUN Feng. Study on lateral vibration of rotary steerable drilling system[J]. Journal of Vibroengineering, 2014, 16(6): 2702–2711.
[13] XUE Qilong, HENRY L, WANG Ruihe, et al. Continuous real-time measurement of drilling trajectory with new state space models of Kalman filter[J]. IEEE Transactions on Instrumentation and Measurement, 2016, 65(1): 144–154. doi: 10.1109/TIM.2015.2479096
[14] SHAO Hujie, ZHANG Xiaoping, WANG Zhi. Efficient closed-form algorithms for AOA based self-localization of sensor nodes using auxiliary variables[J]. IEEE Transactions on Signal Processing, 2014, 62(10): 2580–2594. doi: 10.1109/TSP.2014.2314064
[15] YACLAN Y, BICAN B. Empirical mode decomposition based denoising method with support vector regression for time series prediction A case study for electricity load forecasting[J]. Measurement, 2017, 103: 52–61. doi: 10.1016/j.measurement.2017.02.007
[16] 许昊东,黄根炉,张然,等. 磁力随钻测量磁干扰校正方法研究[J]. 石油钻探技术,2014,42(2):102–106. XU Haodong, HUANG Genlu, ZHANG Ran, et al. Method of magnetic interference correction in survey with magnetic MWD[J]. Petroleum Drilling Techniques, 2014, 42(2): 102–106.
 下载:
下载:

计量
- 文章访问数: 397
- HTML全文浏览量: 177
- PDF下载量: 103





