


连续管钻井(coiled tubing drilling,CTD)是20世纪90年代国外发展起来的热门技术,具有突出的低成本优势和对环境污染小的优点,已经在国外非常规油气资源开发中广泛应用[1,2,3,4,5,6,7,8],并取得了显著的经济效益。我国的连续管钻井技术还处于起步和尝试阶段,迫切需要发展与之配套的钻井理论并研发井下工具。
连续管的轴向刚度和扭转刚度都很低,在钻井定向过程中无法通过在地面旋转管柱的方式来调整工具面角,因此需要一种在井下实现工具面调整的工具。随着定向器的出现,连续管才得以应用于定向井领域。其中,液压定向器由于结构简单、维护成本低而被广泛应用[9,10,11,12,13]。液压定向器是通过循环钻井液的方式进行驱动的,由于其机械结构方面的局限,只能进行单方向固定角度转动。因此,工具面调整的角度只能是其仪器本身固定角度的倍数,是跳跃的、非连续的,这给现场定向施工带来了难度,大多数情况下,调整后的实际钻进工具面角与设计值之间总存在一个小于固定转角的偏差。这种偏差如不及时调整,有可能造成井眼轨迹偏离设计剖面越来越远并最终脱靶的后果。
针对上述问题,现场施工时定向工程师只能依靠经验多次调整工具面来保证中靶,不但增大了定向施工难度,还大大增加了全井施工风险;而且由于各井况的差异,该经验方法不具有普遍的适用性。为了解决这一问题,笔者设计了一种双圆弧定向轨道模型,根据定向施工特点和现场实际情况,设计了新的符合定向要求的井眼轨道,提高了连续管定向轨迹的控制效率,降低了作业风险。
1 设计方案 1.1 设计思路根据定向器角度调整特点进行井眼轨道设计。首先,将工具面角调整到小于理想工具面角的位置上,两者之间差值小于定向器的固定转角值;然后,开始钻进,在钻进一段距离后,再进行一次定向旋转,调整工具面角使其增加一个定向器固定转角;最后,继续钻进直至完成定向要求。
实现整个设计方案的关键在于,如何根据已设计的工具面角来确定中间调整点的角度参数,这就需要建立相应的轨道设计模型,并对其角度约束方程组进行求解。
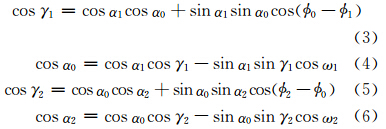
1.2 设计模型 1.2.1 理论依据连续管钻井采用滑动钻进方式下的导向钻具组合来调整和校正井眼轨迹,其造斜特性比较稳定,钻出的井眼轨迹接近于圆弧。因此,笔者主要基于圆弧模型的斜面法扭方位计算模式[14,15,16]进行公式推导。设定向施工起始点为点1,施工结束点为点2,则计算所需理想的工具面角的2个基本公式为[16]:

根据设计思路,把设计起始点1到设计终点2的井眼轨道分成2段来研究,如图 1所示。

|
| 图 1 设计模型示意 Fig. 1 Schematic diagram of design model |
根据式(1)、(2)可以得到:
该设计方法的关键点在于,根据上述井眼轨道约束方程,求解出中间调整点的角度参数和2段圆弧的狗腿角。
1.3 求解方法根据设计思路,结合现场实际施工情况,先设计出2个调整段的工具面角ω1和ω2,再根据设计值计算相关的井眼轨道参数。
1.3.1 ω1的计算首先,根据已知的定向起点和终点的角度参数,利用式(1)和式(2)求得理想的设计工具面角;再根据已知的当前井底工具面角,计算两者之间的差值;最后,根据差值进行调整,使其调整后的实际工具面角与设计工具面角小于定向器固定转角,此时的ω1即为所求。
根据设计思路,中间调整点的工具面角加上定向器固定转角(定向旋转一次)为ω2,即:

根据三角函数基本公式,可以得到:

根据圆弧段终点工具面角的相关计算公式[17],可以得到:
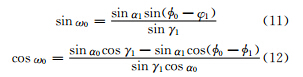
整理式(10)、式(11)和式(12),可以得到:

将式(13)代入式(6),整理得到:

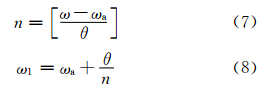
由式(3)、式(4)、式(5)和式(14)构成新的井眼轨道约束方程组,其中α1,α2,φ1,φ2和θ为已知量,ω1通过式(8)计算得出,方程组未知数为α0,φ0,γ1,γ2,方程组中4个方程对应4个未知数,因此方程组是适定的。由于方程组中的方程皆为隐函数超越方程,无法通过公式化简导出未知数的具体表达式,需要采用数值迭代法进行求解[18]。因其求解步骤繁杂,非本文重点,在此不再赘述。
2 计算实例 2.1 实例1某井进行连续管钻井,起始点井斜角20°,井斜方位角30°,工具造斜率15°/30m,液压定向器固定转角20°,要求增斜增方位钻进,井斜角降至60°时井斜方位角为60°,当前井底的工具面角为27°。
根据题意,已知条件是:α1=20°,φ1=30°,α2=60°,φ2=60°,K=15°/30m,ωa=27°,θ=20°。
首先,根据式(1)和式(2)求出所需理想的工具面角ω=39°,已知当前井底工具面角ωa=27°,两者差值λ=12°,此时λ<θ,说明第一调整段不需要旋转工具面角,可以直接在当前工具面角的情况下开始钻进,即ω1=27°。
然后,对新的井眼轨道约束方程组进行数值迭代计算,得到:α0=38.18°,φ0=44.05°,γ1=19.30°,γ2=24.81°。
设起始点位于空间坐标系原点,其他各点参数均以此为基准,每段圆弧4等分,3个等分点的井斜方位和空间坐标见表 1。
| 井深增量/ m | 井斜角/ (°) | 方位角/ (°) | 垂深增量/ m | 北坐标增量/m | 东坐标增量/m |
| 0 | 20.00 | 30.00 | 0 | 0 | 0 |
| 9.65 | 24.40 | 35.31 | 8.93 | 3.06 | 1.98 |
| 19.30 | 28.92 | 39.05 | 17.56 | 6.50 | 4.60 |
| 28.95 | 33.53 | 41.86 | 25.81 | 10.30 | 7.85 |
| 38.60 | 38.18 | 44.05 | 33.63 | 14.43 | 11.70 |
| 51.01 | 43.41 | 49.17 | 43.02 | 19.98 | 17.60 |
| 63.42 | 48.82 | 53.37 | 51.62 | 25.56 | 24.57 |
| 75.83 | 54.37 | 56.92 | 59.32 | 31.10 | 32.55 |
| 88.22 | 60.00 | 60.00 | 66.04 | 36.54 | 41.44 |
某井进行连续管钻井,起始点井斜角70°,井斜方位角40°,工具造斜率15°/30m,液压定向器固定转角20°,要求减斜减方位钻进,井斜角降至40°时井斜方位角为20°,当前井底的工具面角为175°。
根据题意,已知条件是:α1=70°,φ1=40°,α2=40°,φ2=20°,K=15°/30m,ωa=175°,θ=20°。
首先,根据式(1)和式(2)求出所需理想的工具面角ω=203°,已知当前井底工具面角ωa=175°,两者差值λ=28°,根据式(7)和(8)计算得到ω1=195°。
然后,对新的井眼轨道约束方程组进行数值迭代计算,得到:α0=49.85°,φ0=33.03°,γ1=21.01°,γ2=13.44°。
设起始点位于空间坐标系原点,其他各点参数均以此为基准,每段圆弧4等分,3个等分点的井斜方位和空间坐标见表 2。
| 井深增量/ m | 井斜角/ (°) | 方位角/ (°) | 垂深增量/ m | 北坐标增量/m | 东坐标增量/m |
| 0 | 70.00 | 40.00 | 0 | 0 | 0 |
| 10.51 | 64.93 | 38.50 | 4.02 | 7.51 | 6.14 |
| 21.01 | 59.88 | 36.87 | 8.89 | 14.87 | 11.83 |
| 31.52 | 54.85 | 35.07 | 14.55 | 22.03 | 17.03 |
| 42.02 | 49.85 | 33.03 | 20.97 | 28.91 | 21.69 |
| 48.74 | 47.26 | 30.18 | 25.42 | 33.20 | 24.33 |
| 55.46 | 44.74 | 27.08 | 30.09 | 37.44 | 26.65 |
| 62.18 | 42.32 | 23.70 | 34.96 | 41.62 | 28.64 |
| 68.90 | 40.00 | 20.00 | 40.02 | 45.72 | 30.28 |
从以上2个实例的设计数据可以看出,设计的井眼轨道符合定向要求,整个设计轨道光滑,易于在施工现场实现。
3 结论与建议1) 两段式定向调整方法解决了连续管钻井定向过程中的工具面角调整偏差问题,根据设计模型和数值计算方法开发了相应的连续管定向优化设计软件,该软件使用简单,便于现场应用,为实现连续管钻井定向自动优化控制奠定了基础。
2 ) 文中所述方法理论上切实可行,比传统的经验调整方法更具有现场应用价值,有利于提高连续管定向钻进井眼轨迹的控制效率,降低作业风险。
3) 如何在保证定向要求的同时满足目标点位置要求,需要进一步研究。
| [1] | Byrom T G.Coiled-tubing drilling in perspective[J].Journal of Petroleum Technology,1999,51(6):57-61. |
| [2] | Fraser R G,Ravensbergen J.Improving the performance of coiled tubing underbalanced horizontal drilling operations[R].SPE 74841,2002. |
| [3] | Cox R J,Li Jeff,Lupick G S.Horizontal underbalanced drilling of gas wells with coiled tubing[J].SPE Drilling & Completion,1999,14(1):3-10. |
| [4] | Scherschel S R,Graves D G.Underbalanced-directional drilling with coiled tubing:challenges and solutions[R].SPE 37062,1996. |
| [5] | Crouse P C,Lunan W B.Coiled tubing drilling: expanding application key to future[R].SPE 60706,2000. |
| [6] |
宋先知,李根生,王梦抒,等.连续油管钻水平井岩屑运移规律数值模拟[J].石油钻探技术,2014,42(2):28-32. Song Xianzhi,Li Gensheng,Wang Mengshu,et al. Numerical simulation on cuttings carrying regularity for horizontal wells drilled with coiled tubing[J].Petroleum Drilling Techniques,2014,42(2):28-32. |
| [7] |
吕选鹏,周承富,陈辉,等.连续管技术在页岩气勘探开发中应用前景[J].石油矿场机械,2012,41(2):67-70. Lv Xuanpeng,Zhou Chengfu,Chen Hui,et al.Coiled tubing technology prospect in exploration and development of shale gas[J].Oil Field Equipment,2012,41(2):67-70. |
| [8] |
陈朝伟,周英操,申瑞臣,等. 连续管钻井减摩技术综述[J].石油钻探技术,2010,38(1):29-31. Chen Zhaowei,Zhou Yingcao,Shen Ruichen,et al. Overview of drag reducing technologies in coiled tubing drilling[J].Petroleum Drilling Techniques,2010,38(1):29-31. |
| [9] | Zegarra E,Meek D,Cassee U,et al.Intelligent wireless orienter for coiled tubing drilling:development to field test[R].SPE 74836,2002. |
| [10] | Garfield G L,Mackenzie G.Latest developments and new technology for coiled-tubing sidetracking applications[R].SPE 112587,2008. |
| [11] | 贺会群.连续管钻井技术与装备[J].石油机械,2009,37(7):1-6. He Huiqun.The technology and equipment of coiled tubing drilling[J].China Petroleum Machinery,2009,37(7):1-6. |
| [12] | Turner D R,Harris T W R,Slater M,et al.Electric coiled tubing drilling:a smarter CT drilling system[R].SPE 52791,1999. |
| [13] | Tinkham S K,Meek D E,Staal T W.Wired BHA applications in underbalanced coiled tubing drilling[R].SPE 59161,2000. |
| [14] |
刘修善.井眼轨道几何学[M].北京:石油工业出版社,2006:133-138. Liu Xiushan.Geometry of wellbore trajectory[M].Beijing:Petroleum Industry Press,2006:133-138. |
| [15] |
高德利.复杂结构井优化设计与钻完井控制技术[M].东营:中国石油大学出版社,2011:3-5. Gao Deli.Optimized design and control techniques for drilling and completion of complex-structure wells[M].Dongying:China University of Petroleum Press,2011:3-5. |
| [16] |
韩志勇.定向钻井设计与计算[M].东营:中国石油大学出版社,2007:285-291. Han Zhiyong.Design and calculation of directional drilling[M].Dongying:China University of Petroleum Press,2007:285-291. |
| [17] |
鲁港,佟长海,夏泊洢,等.空间圆弧轨迹的矢量描述技术[J].石油学报,2014,35(4):759-764. Lu Gang,Tong Changhai,Xia Boyi,et al.Vector description of spatial-arc wellbore trajectory[J].Acta Petrolei Sinica,2014,35(4):759-764. |
| [18] |
冯果忱.非线性方程组迭代解法[M].上海:上海科学技术出版社,1989:130-168. Feng Guochen.Iterative solution of nonlinear equations[M].Shanghai:Shanghai Science and Technology Press,1989:130-168. |